
17
SISTEMAS LINEALES INVARIANTES EN EL TIEMPO
Sistema causal: y(n)=T[x(-?),…,x(n-1),x(n)]
Sistema causal de memoria finita: y(n)=T[x(n-N),…,x(n-1),x(n)]
Sistema Invariante en el tiempo: y(n-m)=T[x(n-m)]
En general: y(n)=T[x(-?),…,x(n-1),x(n), x(n+1),…,x(?)]
18
SISTEMAS LINEALES INVARIANTES EN EL TIEMPO
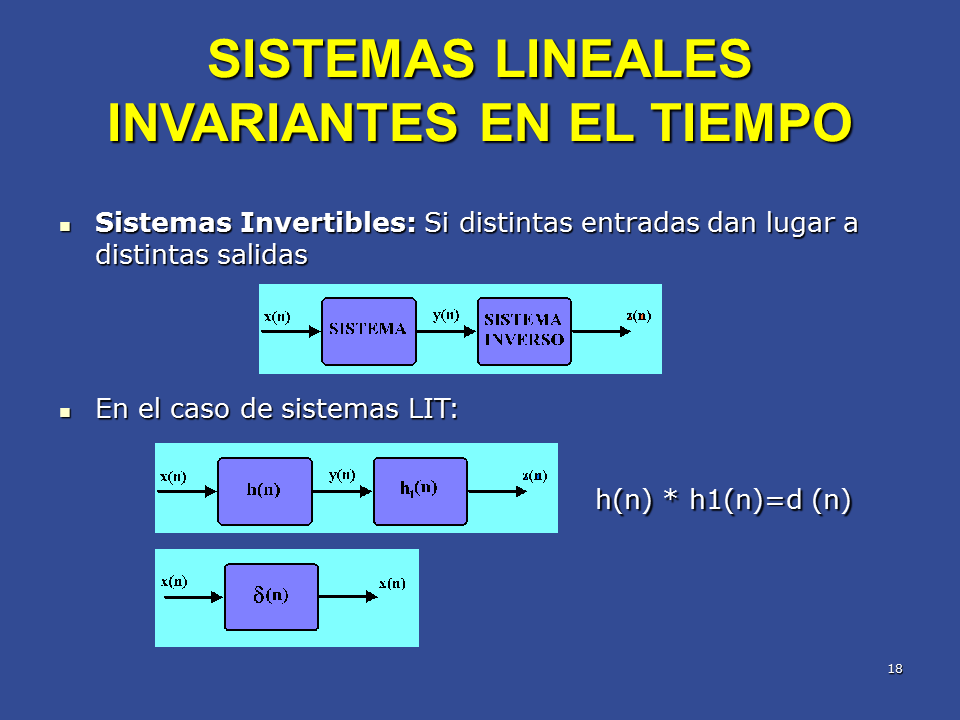
Sistemas Invertibles: Si distintas entradas dan lugar a distintas salidas
En el caso de sistemas LIT:
h(n) * h1(n)=d (n)

19
Si excitamos un sistema discreto con un pulso unitario d (n) obtendremos una respuesta h(m) denominada respuesta al impulso.
Respuesta Impulsional

20
? En general: y[n?=T[x(n)?; ?Por otro lado:
? Por linealidad:
? Por Definición: h(n) = T[?(n)? Respuesta Impulsional del Sistema
? Por Invarianza: h(n-k) = T[?(n-k)?
Suma de Convolución

21
SISTEMAS ESTABLES
? Un Sistema DLI es ESTABLE, si para una entrada acotada, la salida está acotada:
?x(n)? ? M ? ?y(n)? ? N, para M,N finitos
? Por definición:
? Luego, el sistema es estable si está acotado:
?Si un Sistema DLI, es causal: y(n)=T[x(-? ),…,x(n)?

22
SISTEMAS LINEALES INVARIANTES EN EL TIEMPO
SISTEMAS DISCRETOS SISTEMAS CONTINUOS
Suma de Convolución Integral de Convolución

23
ECUACIONES EN DIFERENCIAS
Los sistemas contínuos : Ecuaciones Diferenciales Lineales con coeficientes constantes .
Los sistemas discretos: Ecuaciones en diferencias lineales de coeficientes constantes.
Expresión Recursiva

24
ECUACIONES EN DIFERENCIAS
Caso Particular
Describe un sistema LIT, en el que:
h(n) = bn/a0 si 0£ n£ M ——-> FILTROS FIR
h(n) = 0 en otro caso
Las ecuaciones en diferencias pueden representarse graficamente definiendo los siguientes bloques:
Expresión no Recursiva

25
Casos particulares
SISTEMA CAUSAL
FIR
IIR
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |